


{kind=link}
Nanotechnology编辑优选:柔性三维触觉传感器

文章介绍
通讯作者:
- 吴德志,厦门大学
论文电纺制备了PI/GO纳米纤维膜并以此为介电层制备三维力柔性压力传感器(图1),测试分析了电容式传感器的传感性能,结果表明,原理性样机在法向力0~242kPa和242~550kPa的灵敏度分别为3MPa-1和0.92 Mpa-1,200oC下性能几乎不变。侧向力为3N范围内的灵敏度为1.12N-1,220 kPa压力作用下响应/回复时间为39ms/13ms, 最低检测限10 Pa,176kPa下循环10000次依然保持良好的重复性,如图2所示。

图1 传感器示意图
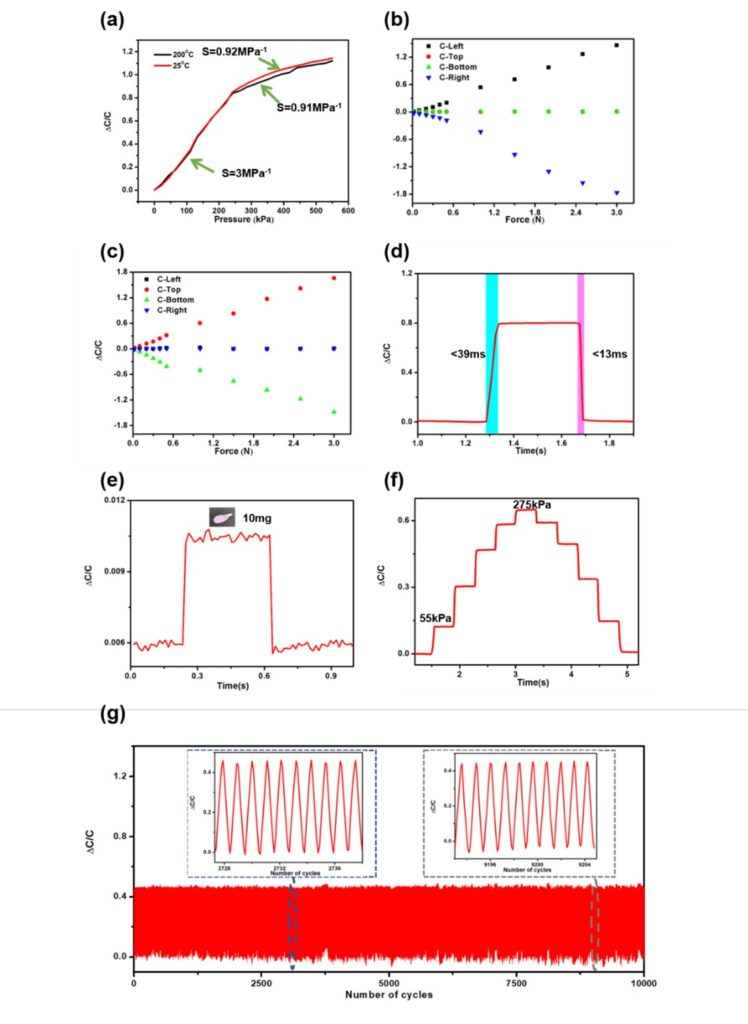
图2 传感器性能
研究了氧化石墨烯对变形、压缩模量以及摩擦系数的作用,如图3所示,在GO含量小于0.0885%时,增加GO可降低纤维膜的压缩模量,降低摩擦系数,这有利于法向和侧向灵敏度的提升。
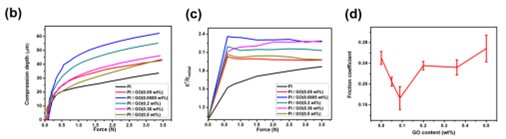
图3 纳米纤维膜压缩深度、相对介电系数和摩擦系数
将该传感器贴附在机械手表面,其可高效检测机械手抓取不同物体时的行为。也可以将该传感器作为柔性板操控无线玩具车。
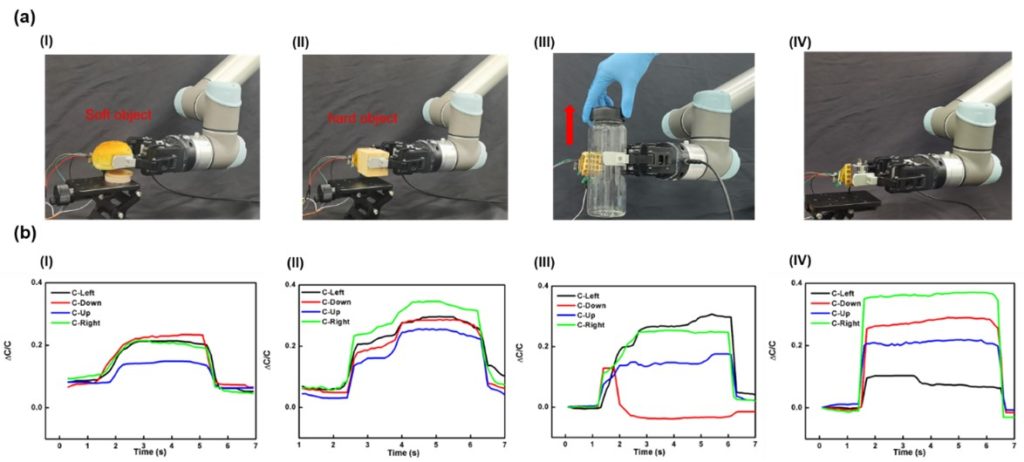
图4 机械手抓取实时监控
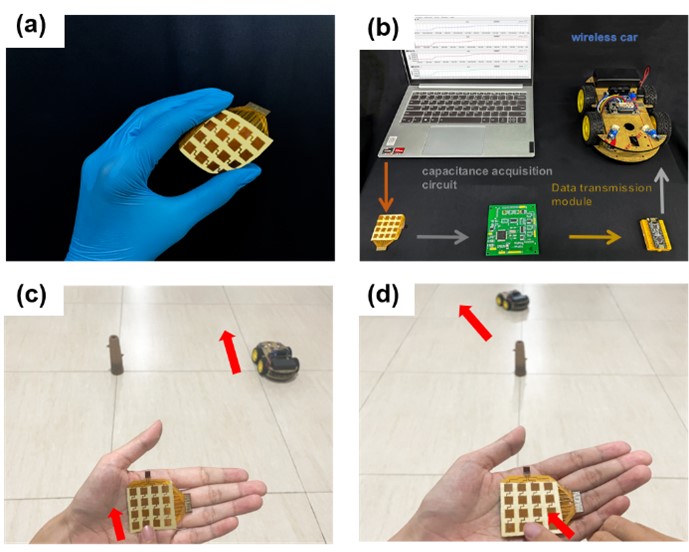
图5 压力传感器用于控制玩具车运动
研究背景:
柔性触觉传感器在智能机器人、生理健康监测、人机交互等领域应用很广。传统方法取得了长足的进步,但在高灵敏稳定检测多方向力上还存在挑战,特别是高压力下敏感不同方向的压力十分困难。
作者介绍

吴德志 教授
厦门大学
- 吴德志,博士,厦门大学机电工程系教授。主要研究微纳制造技术及装备、电子皮肤和软体机器人等,主持重点研发课题、国家自然科学基金重大研究计划/面上项目、航空科学基金、深圳科技研发资金项目以及企业研发项目等。已在ACS AMI、Composite Part b、Nanoscale、Electrochimica Acta和Nanotechnology等期刊上发表学术论文近90篇,第一申请人获授权14项。
期刊介绍

- 2021年影响因子:3.953 Citescore:6.2
- Nanotechnology(NANO)创刊于1990年,是第一本纳米科研和技术领域的专业期刊。NANO发表纳米技术研究发展前沿的高水平研究论文及纳米研究进展的综述,主要集中在纳米能源、生物和医学、电子和光子、图案和纳米加工、传感和驱动、材料合成和材料性能等领域。