


05 Feb 2024
ERL编辑优选:中国元素碳空气污染及其区域性健康差异
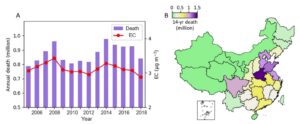
本篇研究来自美国埃默里大学刘阳、中国疾病预防控制中心施小明课题组。本研究采用卫星遥感、现有地面观测、机器学习技术和大气大数据的组合,预测2005年至2018年期间中国各地的地面大气元素碳浓度,揭示出根据不同排放源和区域背景量身定制环境政策和干预措施的重要性。 文章介绍 Atmospheric elemental carbon pollution and its regional health disparities in China Yun Hang, Xia Meng, Yuzhi Xi, Danlu Zhang, Xiuran Lin, Fengchao Liang, Hezhong Tian, Tiantian Li, Tijian Wang, Junji Cao, Qingyan Fu, Sagnik Dey, Shenshen Li, Kan Huang, Haidong Kan, Xiaoming Shi(施小明) and Yang Liu(刘阳) 通讯作者: 施小明,中国疾病预防控制中心 刘阳,美国埃默里大学 研究背景: 先前的研究报告称,与总的环境细颗粒物(PM2.5)相比,大气元素碳(EC)可能具有较高的潜在毒性。然而,大部分关于EC的研究都是在美国和欧洲进行的,而中国的EC污染水平明显高于欧美地区。由于缺乏记录长期EC水平的监测网络,研究中国EC暴露的健康影响面临相当大的挑战。中国在过去十年对PM2.5总量实施了严格的减排措施,多项研究表明其浓度显著下降,但EC水平的变化及其相关的死亡负担仍然大体上是未知的。 ...






{kind=link}